
Negli articoli precedenti di questa lunga guida, abbiamo costruito una periferica per Head Tracking con Arduino e giroscopio, l’abbiamo programmata e calibrata; ora passiamo all’associazione con OpenTrack ed al suo utilizzo.
OpenTrack
OpenTrack è un software freeware che ci permetterà di far dialogare il nostro Head Tracker sia con ArmA che con qualsiasi altro simulatore. In realtà il nostro Head Tracker viene già riconosciuto da ArmA come ‘EDtracker’, ma si muove a scatti e non è per nulla preciso, visto che i segnali di input non vengono correttamente interpretati. Per scaricare OpenTrack seguite il link sotto:
- OpenTrack download
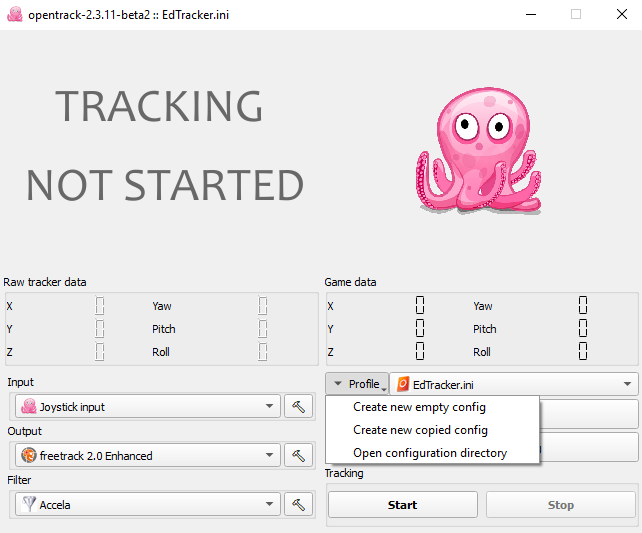
Una volta scaricato ed installato, andiamo a configurarlo:
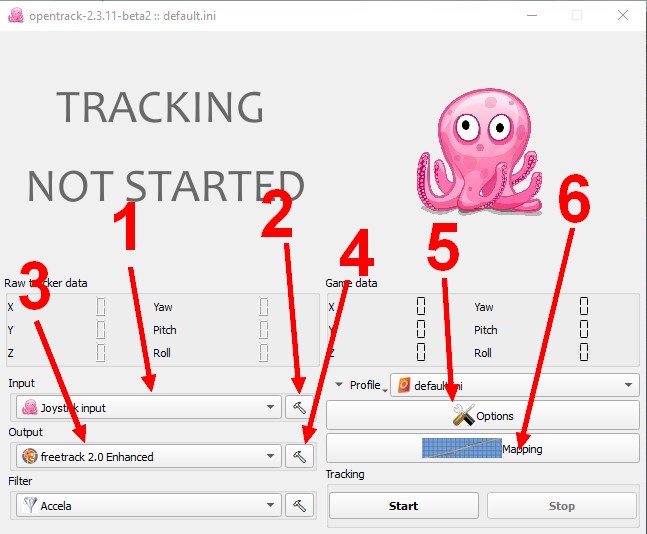
- Tipo di ingresso (noi selezioneremo Joystick input);
- Clicchiamo sul martello (2) e apparirà questa schermata;
- Nella finestrella Output andiamo a selezionare il nostro Edtracker e lasciamo tutte le impostazioni come sono;
- Ora andiamo a configurare le DLL necessarie per far vedere l’Head Tracker ai nostri giochi. Dalla tendina selezionate freetrack 2.0 Enhanced e poi cliccate sul martello (4);
- Nella finestra che appare, selezionate Use TrackIR, disable freetrack: questo farà sì che il nostro Head Tracker venga rilevato come se fosse un Track IR della Natural Point
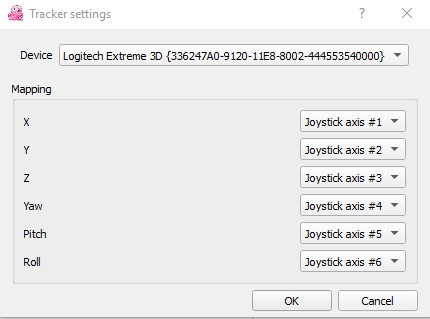
Schermata delle opzioni Input 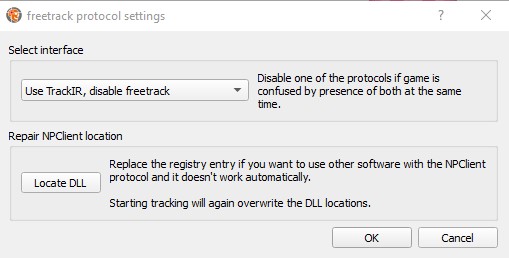
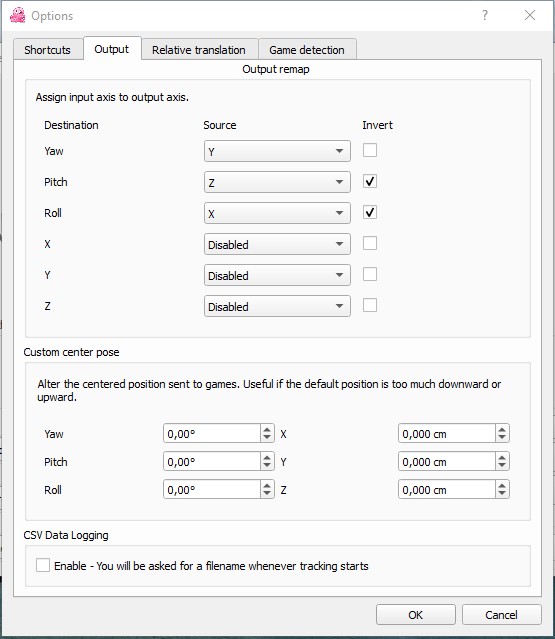
Schermata delle opzioni Output
Ora nella schermata principale clicchiamo su Options: qui troverete una finestra con 4 flag:
- Il primo, Shortcuts, permette di configurare tutti i tasti per il controllo di OpenTrack;
- Il secondo, Output, permette di configurare gli assi del nostro Head Tracker in base a come preferiamo utilizzarlo (nel mio caso, per ArmA, ho scelto di usare solo l’asse z e l’asse x e li ho impostati come Pitch e Roll);
- Il terzo, Relative translation, permette di impostare le traslazioni dell’Head Tracking attraverso curve relative, opzione per me disabilitata
- Il quarto e ultimo flag, Game detection, parla da solo. Permette di riconoscere il gioco lanciato e avviare la configurazione relativa a quel gioco
- Ultimo passaggio, clicchiamo sul pulsante Mapping. Non ho fatto lo screen, ma, semplicemente, possiamo definire la curva per ogni asse come meglio crediamo. Personalmente non ho toccato nulla.
Una cosa importante da ricordarsi è che su OpenTrack è possibile creare profili diversi per ogni gioco: per farlo basta cliccare sul pulsante Profile, sopra al pulsante Options.
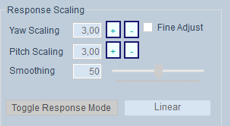
Altra nota importante, la sensibilità: nell’utilizzo con ArmA, ho notato di avere un movimento lento e che non mi soddisfaceva a dovere. Per risolvere mi è bastato riaprire la GUI di calibrazione ed aumentare da 1 a 3 il valore di Pitch e Yaw nella sezione a sinistra, Response Scaling.
Conclusione
Da ex possessore di TrackIR della Natural Point, che indubbiamente è un ottimo prodotto, devo dire che l’Head Tracking costruito con Arduino e giroscopio non ha nulla da invidiargli, sia come funzionamento che come precisione, anzi! Personalmente mi trovo molto meglio con quello costruito, perché non ha il limite dei LED, è completamente personalizzabile sia per le curve che per la precisione, viene riconosciuto benissimo dal gioco e, soprattutto, il costo è bassissimo






… [Trackback]
[…] There you will find 12340 more Infos: blog.9thgenericunit.com/costruire-una-periferica-da-head-tracking-con-arduino-e-giroscopio-parte-4/ […]
Comments are closed.