
Negli articoli precedenti abbiamo parlato del sistema di Head Tracking con Arduino e abbiamo visto come costruirlo utilizzando un Arduino ed un giroscopio. Ora, è arrivato il momento di passare alla calibrazione.
Prima di tutto dobbiamo scaricare i due software necessari, ossia i driver dell’Arduino ed il software di calibrazione vero e proprio (i link sotto fanno riferimento ai driver per Windows 10 a 64 bit);
Per prima cosa installate il driver senza collegare l’Arduino, confermate i vari passaggi e al termine collegate la vostra periferica che verrà riconosciuta.
ATTENZIONE: se già vi divertite a smanettare con Arduino, non sarà necessario
installare i driver.
Ora che il nostro Arduino è collegato, dobbiamo programmarlo e poi calibrarlo. Per farlo, scompattiamo il file del software e facciamo doppio click sull’eseguibile. Ci troveremo in questa schermata.
ATTENZIONE: spesso al primo avvio compare un errore: basta chiudere l’applicazione e poi riaprirla e il problema è risolto.
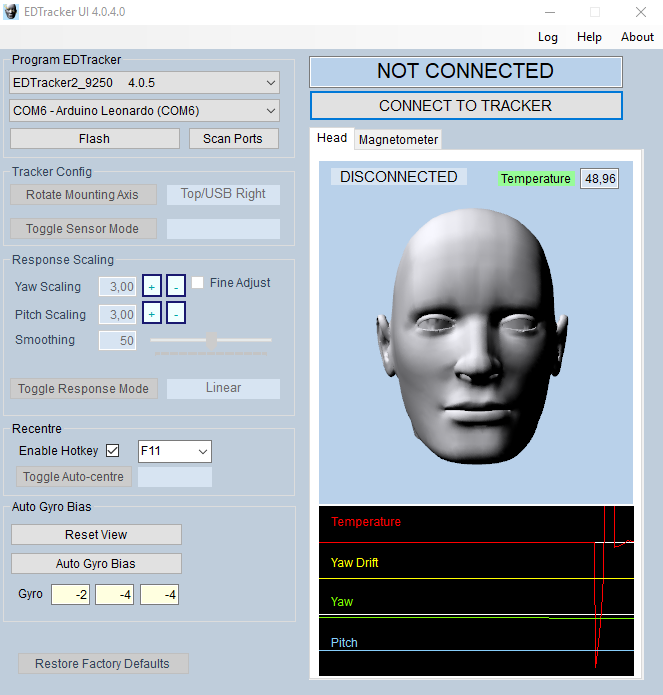
- Prima cosa da fare è verificare che nella seconda tendina in alto a sinistra sia selezionata la porta COM riferita all’Arduino: questo indicherà che è stato correttamente riconosciuto. Se così non fosse, basterà cliccare su Scan Ports;
- Ora, controlliamo nella prima finestrella in alto a sinistra che il modello di edTracker selezionato sia corretto in base al giroscopio che abbiamo (se avete preso il kit come il mio, probabilmente il modello sarà identico);
- A questo punto appoggiate l’Head Tracker sul tavolo (possibilmente su una superficie piana) e non toccatelo. Una volta che siete sicuri che stia immobile, cliccate su “Flash”, facendo così partire la programmazione dell’Arduino, che comincerà a lampeggiare;
- Terminata la procedura, il sistema comincerà automaticamente a fare la calibrazione del giroscopio e lasciate terminare la procedura.
Bene, ora abbiamo l’Arduino programmato e il giroscopio che è stato calibrato, ma prima di procedere è necessario eseguire anche la calibrazione del magnetometro, integrato nel giroscopio, che avrà il compito di evitare la deriva del giroscopio mentre manteniamo ferma la testa (problema che era evidente nella versione del giroscopio 6050).
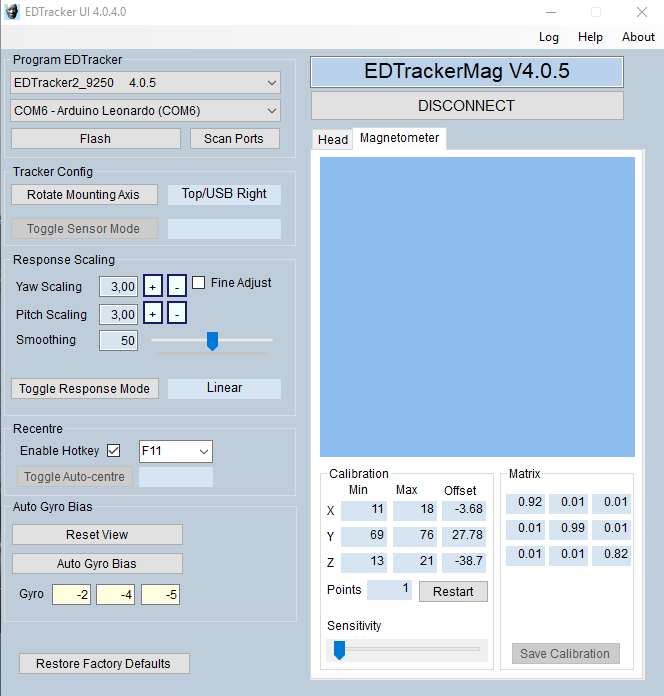
- Cliccate sul flag “Magnetometer” sopra alla testona sulla destra;
- Ora andare sul cursore “Sensibility” finché non cominceranno ad aumentare i numeri all’interno della casella “Points”;
- Cliccate sul pulsante “Restart” e cominciate a ruotare l’Head Tracker sui 3 assi principali, sia in un senso che nell’altro; successivamente, cominciate a ruotarlo in tutte le posizioni possibili. Noterete che il valore “Points” aumenta: questo significa che sta segnando dei punti per creare la calibrazione;
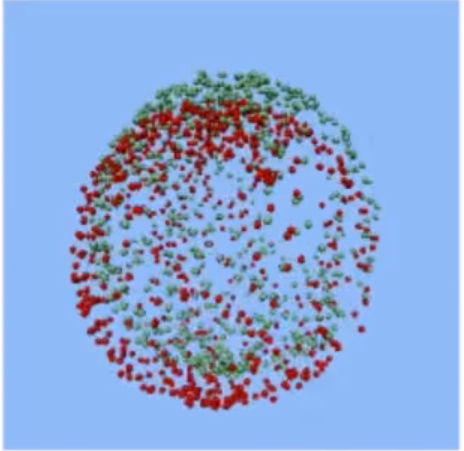
- Quando pensate di aver terminato cliccate sul pulsante “Save Calibration”. A questo punto vi apparirà un grafico con dei punti verdi e rossi: questi sono tutti i punti creati dal magnetometro durante le varie rotazioni eseguite. Il risultato dovranno essere due sfere (all’incirca) come quelle nell’immagine.
- Ultimo passaggio per terminare la calibrazione è quello di calibrare appunto il giroscopio. Per farlo dobbiamo appoggiare nuovamente il nostro Head Tracker su una superficie piana e premere, sulla sinistra, “Auto Gyro Bias”: questo provvederà a fare l’azzeramento del giroscopio. L’operazione potrebbe durare anche un minuto e oltre: non preoccupatevi e NON TOCCARE ASSOLUTAMENTE L’HEAD TRACKER.
Terminata anche questa procedura il nostro Head Tracker è finalmente pronto all’uso e non sarà più necessario avviare questo software se non per ripetere, eventualmente, la calibrazione.
Nel prossimo ed ultimo articolo andremo a collegare l’Head Tracker ad Open Track per poi finalmente poterlo utilizzare in gioco.





